
آموزش کامل ماژول L298N | راهاندازی موتور DC + دیتاشیت و روش اتصال
🔧 معرفی کامل ماژول درایور موتور L298N | راهاندازی موتورهای DC و استپر + دیتاشیت رسمی
🧩 موضوع مقاله:
در این مقاله قصد داریم بهصورت کامل و تخصصی به بررسی ماژول درایور موتور L298N بپردازیم. این ماژول یکی از پرکاربردترین قطعات در پروژههای رباتیک، اتوماسیون صنعتی، و ساخت سیستمهای حرکتی با موتورهای DC و استپر هست. اگر به دنبال راهاندازی موتور با کنترل دقیق جهت و سرعت هستی، این مقاله دقیقاً برای تو نوشته شده.
---
⚙️ ماژول L298N چیست و چه کاری انجام میدهد؟
ماژول L298N یک برد درایور دو کاناله بر پایه آیسی قدرتمند L298N ساخت شرکت STMicroelectronics هست. این آیسی از نوع پل H دوگانه بوده و قابلیت کنترل دو موتور DC یا یک موتور استپر را بهصورت مستقل دارد. با استفاده از این ماژول میتونی جهت چرخش و سرعت موتور رو با دقت بالا کنترل کنی، بدون نیاز به مدارهای پیچیده یا قطعات جانبی زیاد.
این ماژول بهصورت آماده روی یک برد مونتاژ شده که شامل ترمینالهای پیچی برای اتصال موتور و تغذیه، هدر پین برای اتصال به میکروکنترلر، دیودهای محافظ داخلی، و جامپرهای کنترلی هست. همه چیز آمادهست تا فقط با چند سیمکشی ساده، موتورهای خودت رو راه بندازی.
---
📄 لینک دیتاشیت رسمی ماژول L298N:
برای مشاهده مشخصات کامل، نمودار پینها، ولتاژها، جریانها و نحوه عملکرد داخلی آیسی L298N، میتونی از دیتاشیت زیر استفاده کنی:
---
🔍 کاربردهای ماژول L298N در پروژههای عملی:
ماژول L298N بهدلیل طراحی ساده، قیمت مناسب و قابلیتهای کامل، در پروژههای زیادی استفاده میشه. برخی از کاربردهای رایج عبارتند از:
- ✅ رباتهای دو چرخ یا چهار چرخ: کنترل مستقل چرخها برای حرکت دقیق
- ✅ موتورهای استپر در CNC یا پرینتر سهبعدی
- ✅ دربهای اتوماتیک، بازوهای مکانیکی و سیستمهای حرکتی
- ✅ پروژههای آموزشی با آردوینو، ESP32، STM32 و سایر بردهای توسعه
- ✅ سیستمهای اتوماسیون خانگی یا صنعتی با کنترل از راه دور
- ✅ ماشینهای کنترلی، رباتهای تعقیب خط، رباتهای اجتناب از مانع
این ماژول بهخاطر پشتیبانی از ولتاژ بالا (تا 35 ولت) و جریان مناسب (تا 2 آمپر برای هر کانال)، گزینهای عالی برای موتورهای متوسط تا نیمهسنگین محسوب میشه.
---
📐 مشخصات فنی ماژول L298N:
- چیپست اصلی: L298N – درایور پل H دوگانه
- ولتاژ تغذیه موتور: 5 تا 35 ولت DC
- جریان خروجی: تا 2 آمپر برای هر کانال (پیک)
- توان کل: حدود 25 وات
- ابعاد برد: حدود 43 × 43 × 27 میلیمتر
- وزن: حدود 30 گرم
- دیودهای محافظ داخلی برای بارهای القایی
- ترمینالهای پیچی برای اتصال موتور و تغذیه
- هدر پین برای اتصال به میکروکنترلر
- جامپرهای ENA و ENB برای فعالسازی یا کنترل سرعت با PWM
🔌 روش اتصال ماژول L298N به موتور و میکروکنترلر
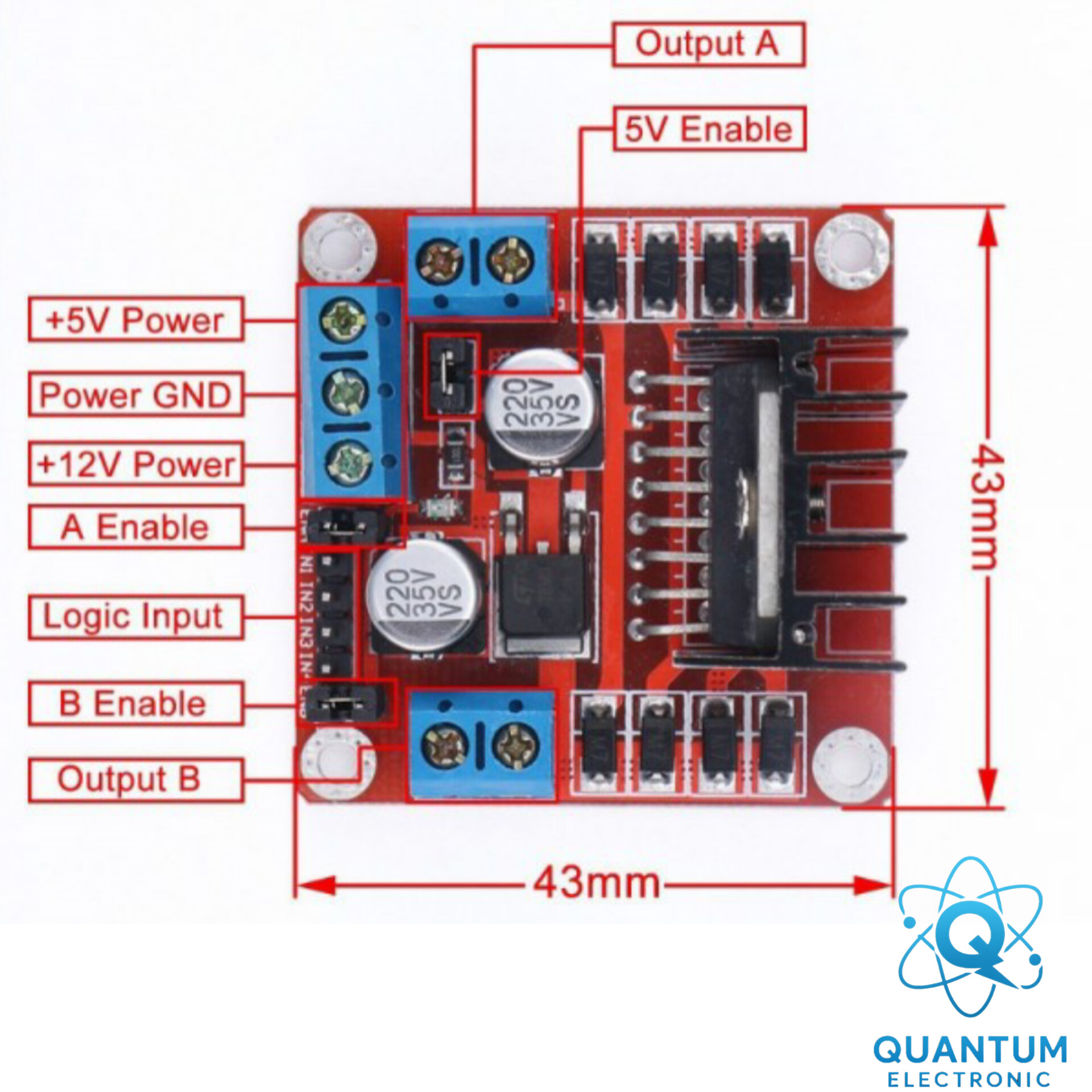
یکی از مزایای اصلی ماژول L298N، سادگی در سیمکشی و راهاندازی هست. در ادامه، مراحل اتصال کامل این ماژول رو توضیح میدیم:
---
1. اتصال تغذیه:
- تغذیه موتور از طریق ترمینالهای +12V و GND تأمین میشه
- ولتاژ ورودی میتونه بین 5 تا 35 ولت DC باشه، اما برای موتورهای معمولی 12 ولت رایجه
- از منبع تغذیه پایدار و فیلتر شده استفاده کن تا نویز و نوسان کاهش پیدا کنه
---
2. اتصال به میکروکنترلر:
- پینهای IN1 و IN2 برای کنترل جهت موتور A
- پینهای IN3 و IN4 برای کنترل جهت موتور B
- پینهای ENA و ENB برای فعالسازی یا کنترل سرعت هر کانال
• اگر جامپر ENA وصل باشه، موتور A همیشه فعال میمونه
• اگر جامپر برداشته بشه، میتونی ENA رو به خروجی PWM وصل کنی تا سرعت رو کنترل کنی
• همین منطق برای ENB و موتور B هم صدق میکنه
---
3. اتصال خروجی موتور:
- موتور A به ترمینالهای OUT1 و OUT2 وصل میشه
- موتور B به ترمینالهای OUT3 و OUT4 وصل میشه
- برای موتورهای استپر، باید از هر دو کانال بهصورت همزمان استفاده بشه
---
4. کنترل جهت چرخش:
برای هر موتور، با تغییر وضعیت دو پین ورودی میتونی جهت چرخش رو کنترل کنی:
| IN1 | IN2 | جهت موتور A |
|-----|-----|--------------|
| 1 | 0 | جلو |
| 0 | 1 | عقب |
| 0 | 0 | توقف |
| 1 | 1 | توقف |
همین جدول برای IN3 و IN4 و موتور B هم صدق میکنه.
---
5. کنترل سرعت با PWM:
برای کنترل سرعت، باید خروجی PWM میکروکنترلر رو به پین ENA یا ENB وصل کنی. مقدار PWM بین 0 تا 255 (در آردوینو) تعیینکننده سرعت چرخش موتور هست. هرچه مقدار بیشتر باشه، سرعت بیشتر میشه.
---
🛠️ نکات نصب و ایمنی:
- از اتصال معکوس ولتاژ ورودی خودداری کن
- برای موتورهای با جریان بالا، از هیتسینک یا فن خنککننده استفاده کن
- دیودهای داخلی از آسیب به مدار در برابر بارهای القایی محافظت میکنن، اما در پروژههای سنگین بهتره از دیودهای خارجی هم استفاده بشه
- در صورت استفاده در خودرو، پیشنهاد میشه از ماژول افزاینده ولتاژ تا 24V بهره بگیری


دیدگاه خود را بنویسید